Virtual teaching box for Melfa Movemaster industrial robotic arm.
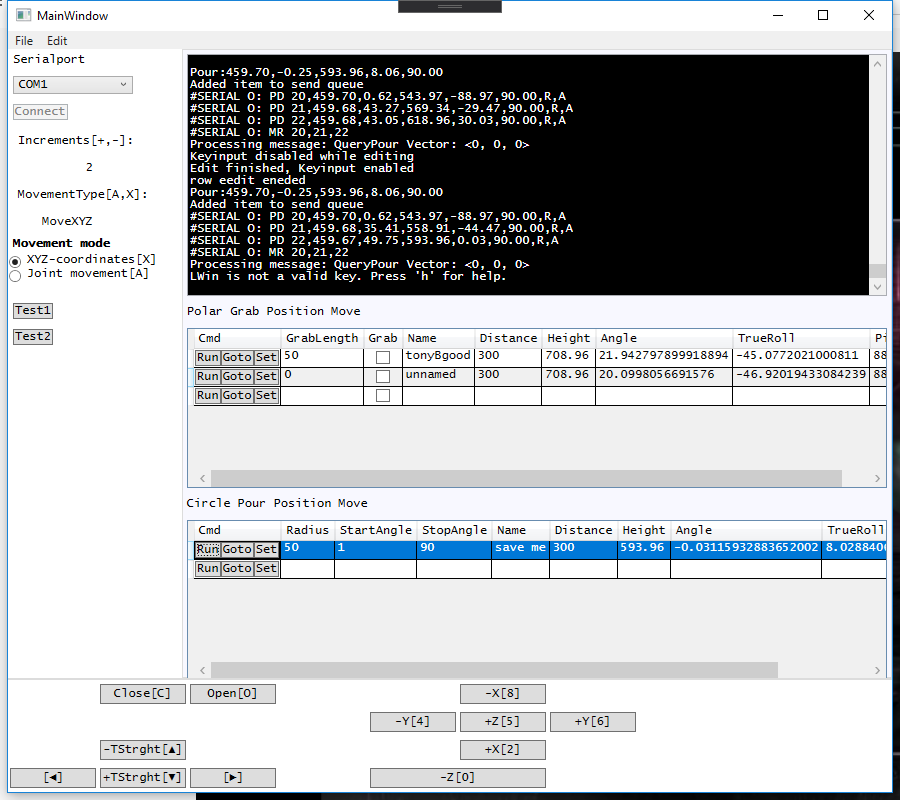
This is a WPF application which will send serial output according to the legacy Melfa Basic V commands for basic robot movements. This enables easy jogging of a robot without the physical teaching box connected and instead using a computer keyboard.
Select COM-port in drop-down list and press Connect prior to issuing any commands.
The program has different keymappings depending on which movement mode is selected, either XYZ or Join Jog. Designed to be used with the numpad-keys.
| Key | Command |
|---|---|
| X | Selects XYZ movement mode |
| A | Selects Joint movement mode |
| W | Outputs current pose of robot |
| O | Opens gripper |
| C | Closes gripper |
| Q | Queries for a composite movement of grapping object at polar coordinate. |
| P | Query for a composite movement of "pouring liquid" by moving the tooltip around the circumference of a 3D circle while rolling the tool. |
| Esc | Quits application |
| Key | Command |
|---|---|
| 5 | +Z |
| 0 | -Z |
| 2 | +X |
| 8 | -X |
| 6 | +Y |
| 4 | -Y |
| Down | +ToolStraight |
| Up | -ToolStraight |
| Key | Command |
|---|---|
| 0 | +Elbow |
| 2 | -Elbow |
| 5 | +Shoulder |
| 8 | -Shoulder |
| 6 | +Waist |
| 4 | -Waist |
| Down | +Pitch |
| Up | -Pitch |
| Left | +Roll |
| Right | -Roll |