This is a RobotStudio Smart Component to Compare two Clouds of Points in .bin format. Colored from green for same Z to Red for maximal amplitude.
- Update ABB.Robotics.* References to Good RobotStudio SDK Version path with Project - Add Reference - Browse.
- On Project Properties:
- Application: Choose good .NET Framework version.
- Build Events: Post Build Events: Replace with the good LibraryCompiler.exe Path.
- Debug: Start External Program: Replace with the good RobotStudio.exe Path.
- In \RSCompareCloudsOfPoints\RSCompareCloudsOfPoints.en.xml:
- Replace xsi:schemaLocation value with good one.
- Same for \RSCompareCloudsOfPoints\RSCompareCloudsOfPoints.xml.
- In $(RobotStudioPath)\Bin\RobotStudio.exe.config file:
- Add in section
<configuration><runtime><loadFromRemoteSources enable="true"/>
- Add in section
- Start first RobotStudio to get RobotStudio.exe.config loaded.
- Then attach its process in VisualStudio Debug - Attach to Process..
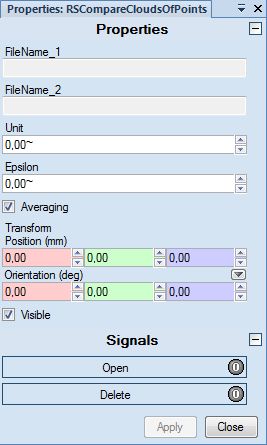
- FileName_1:
FileName of First Cloud of Points. Colored in gray if not found in other file. (Read Only) - FileName_2:
FileName of Second Cloud of Points. Colored in gray-blue if not found in other file. (Read Only) - Unit:
Unit/Scale of Cloud of Points. (For the next Open) - Epsilon:
Roundoff for X and Y values of Cloud of Points to compare. (For the next Open) - Averaging:
Averaging Z values for same X and Y point. Else only get first value. (For the next Open) - Transform:
Transformation of Result Cloud of Points. - Visible:
If Result Cloud of Points is visible.
- Open:
Open two Clouds of Points file to Compare. (Clear Olders) - Delete:
Delete Clouds of Points. (Use it before removing Component)